直流电机及其控制
电机的转动原理:1个电机对接ESP32开发板2个引脚,当两个引脚分别接高低电平则开始以一定方向转动,电平相反则反方向转动,同为低或者高均不转动。
电机转速控制:控制电信号PWM波的占空比,占空比越大,说明周期内高电平持续时间越长,电机转速越快。
一般引脚的高电平为3.3V,通常不够驱动电机转动,需要5V左右电压可正常驱动轮子转动,所以需要使用大电池给小车供电。
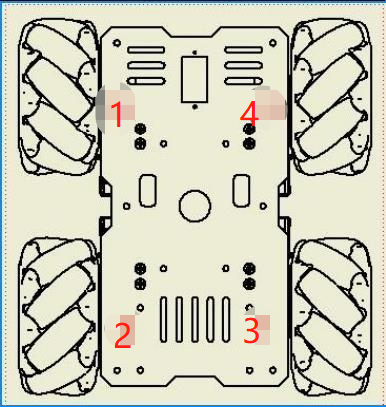
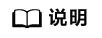
小车车轮配置麦克纳姆轮,车轮原理及方向控制如下图所示,只需调节4个电机的转动方向及速度即可实现小车的各种运动方式。
车轮原理:依靠各自机轮的方向和速度,这些力的最终合成在任何要求的方向上产生一个合力矢量,从而保证了这个平台在最终的合力矢量的方向上能自由地移动,而不改变机轮自身的方向。在它的轮缘上斜向分布着许多小滚子,故轮子可以横向滑移。小滚子的母线很特殊,当轮子绕着固定的轮心轴转动时,各个小滚子的包络线为圆柱面,所以改轮能够连续地向前滚动。麦克纳姆轮结构紧凑,运动灵活,是很成功的一种全方位轮。有4个这种新型轮子进行组合,可以更灵活方便的实现全方位移动功能。
图2 麦克纳姆轮方向控制
父主题: 小车组成